研究紹介
点群セグメンテーションのための距離同変畳み込み
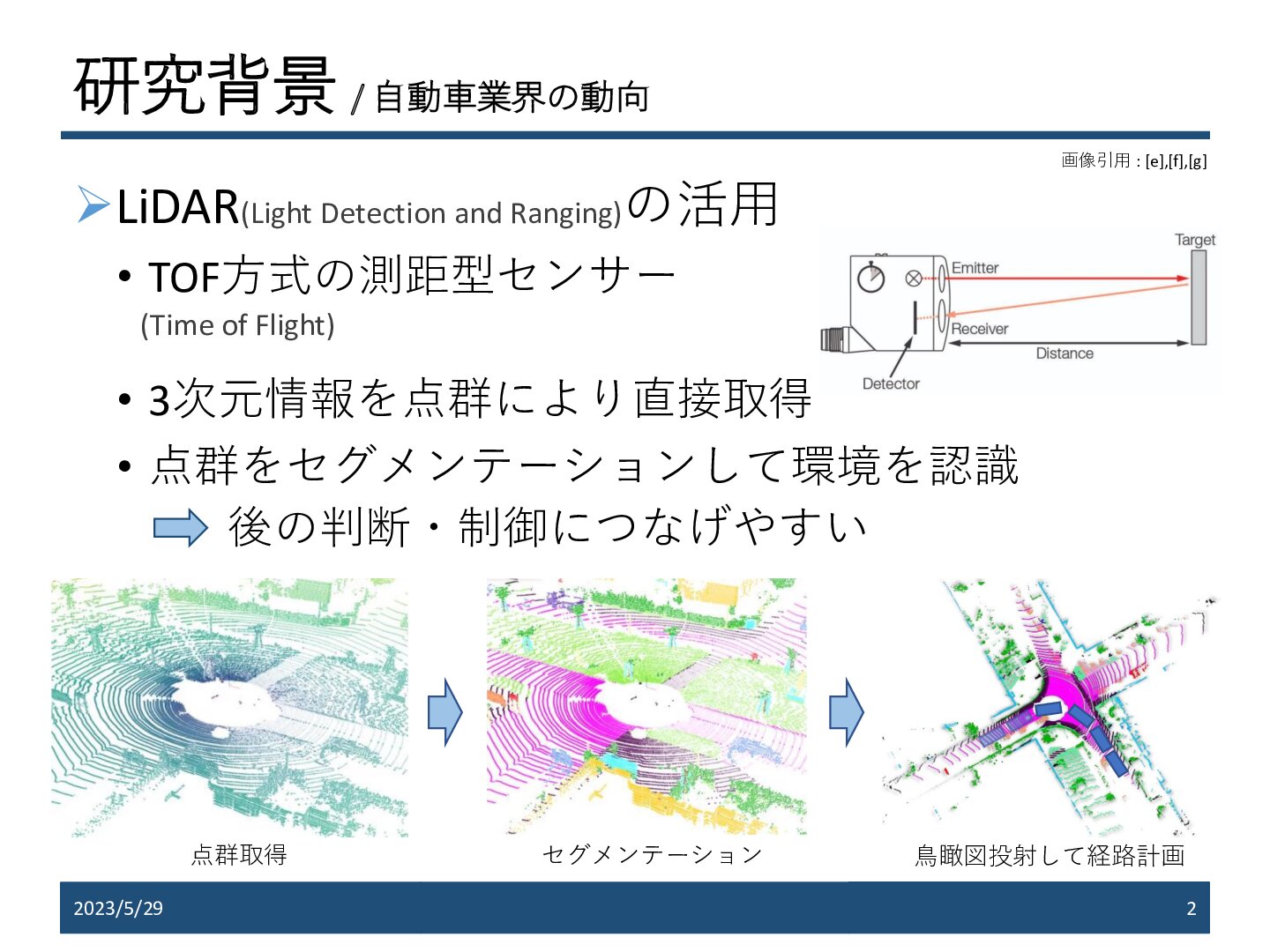
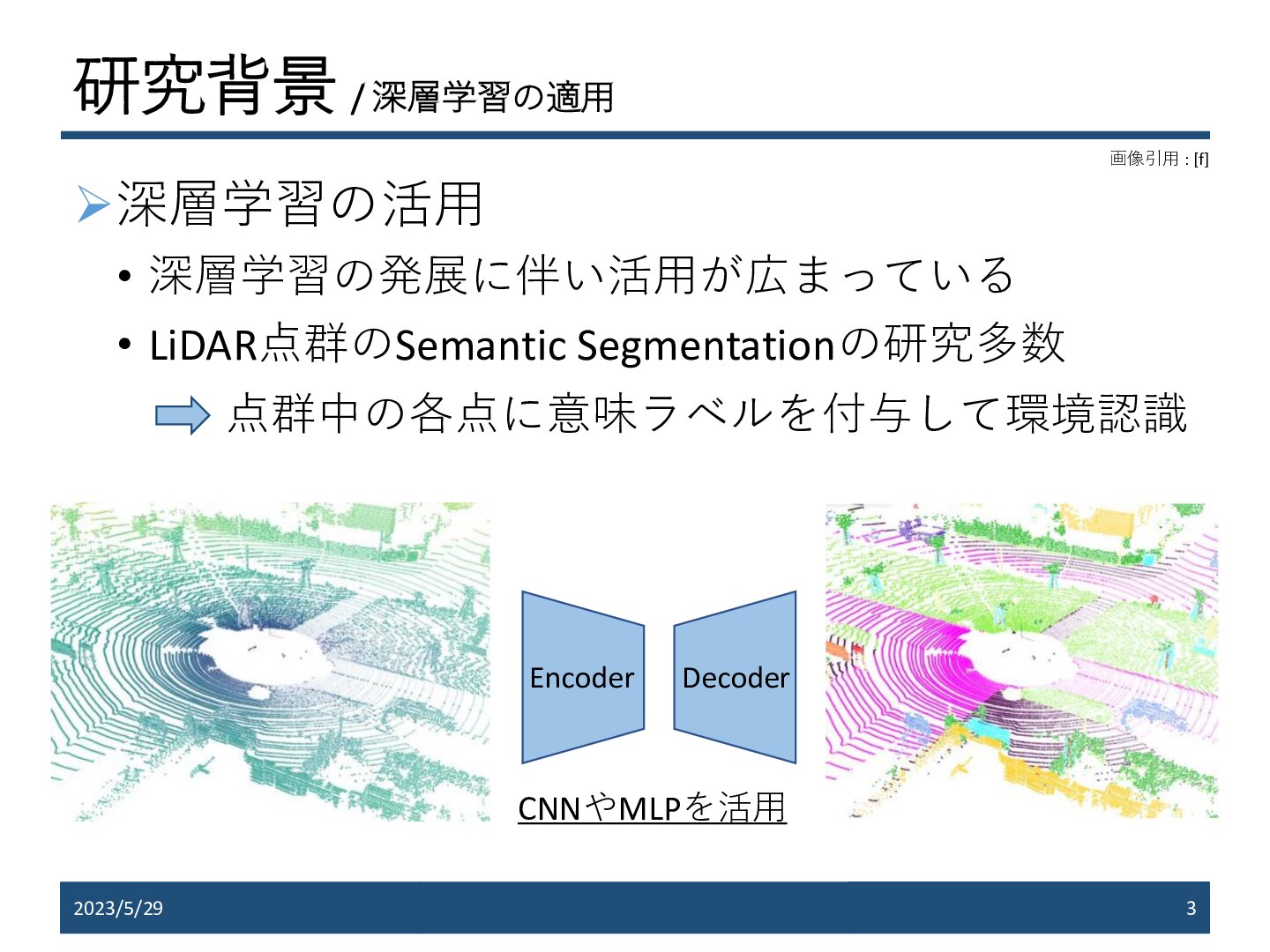
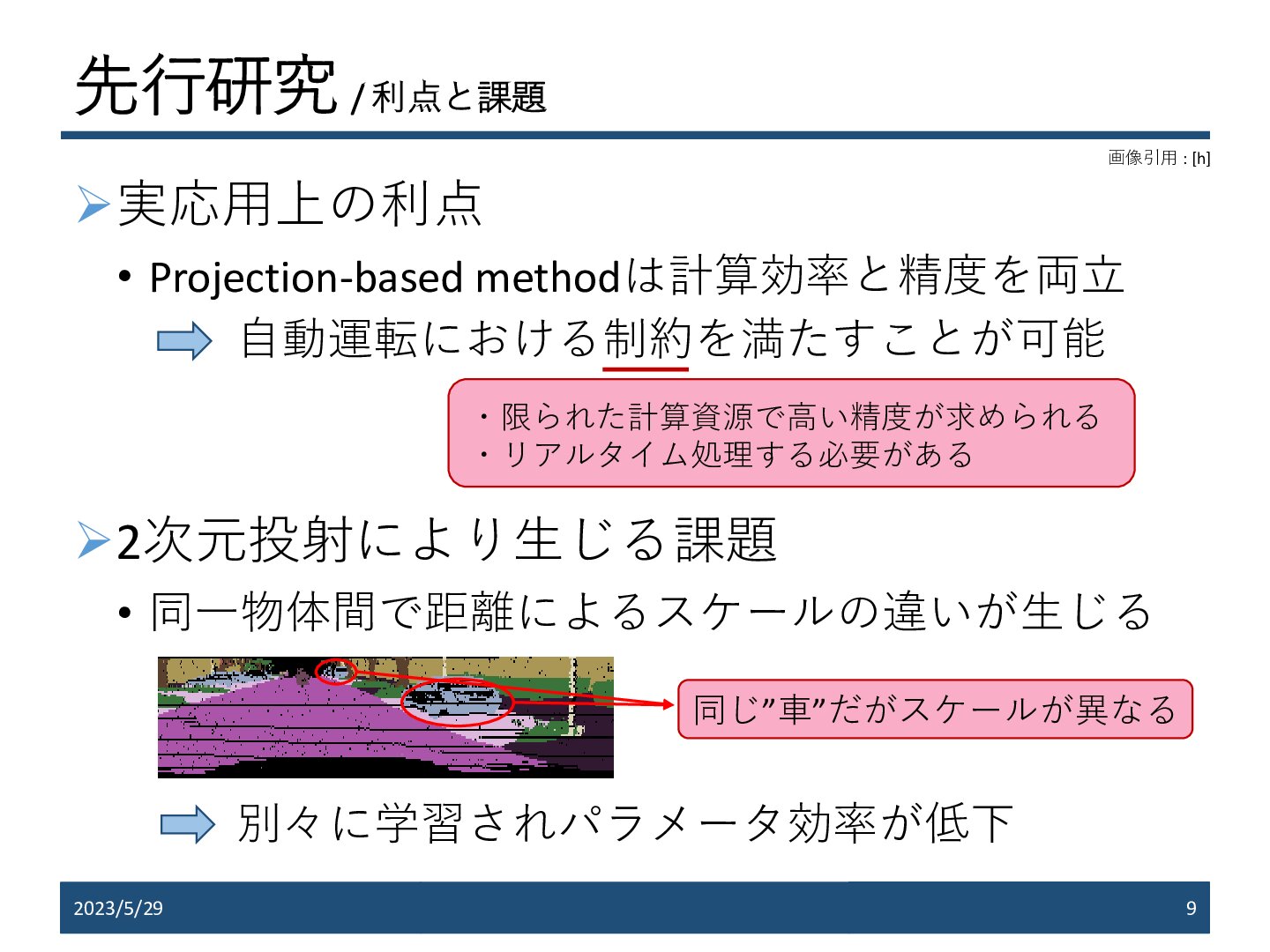
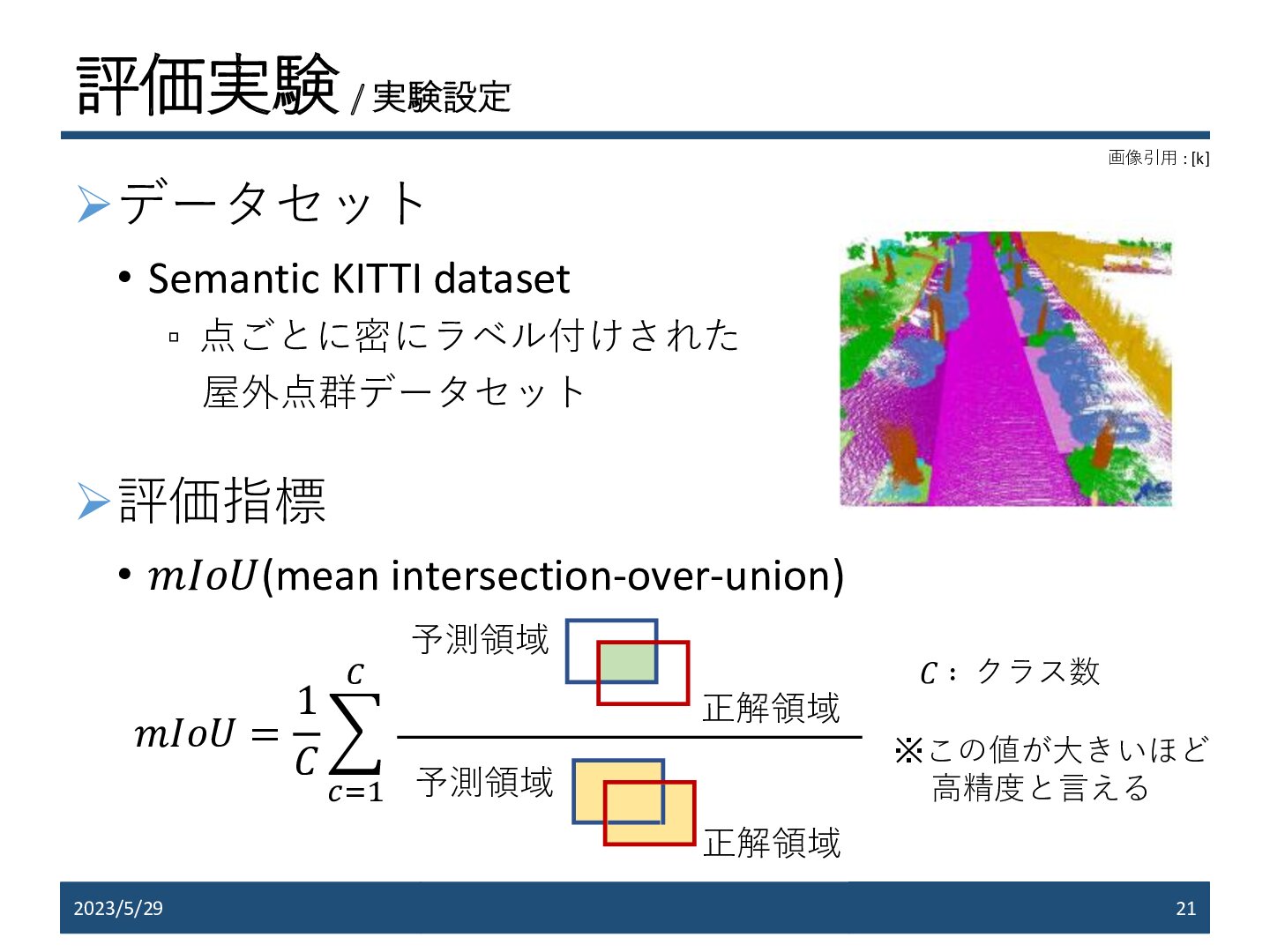
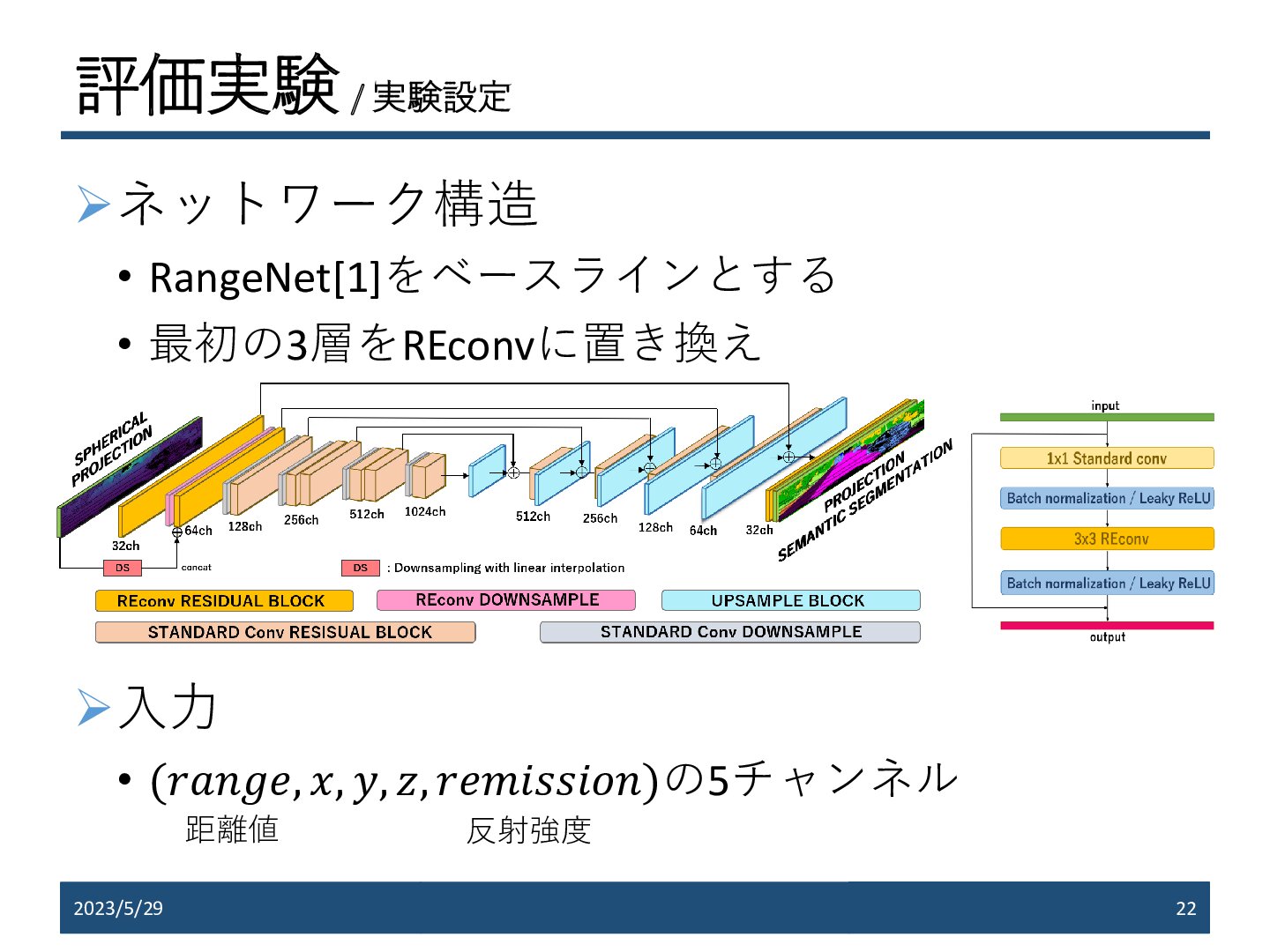
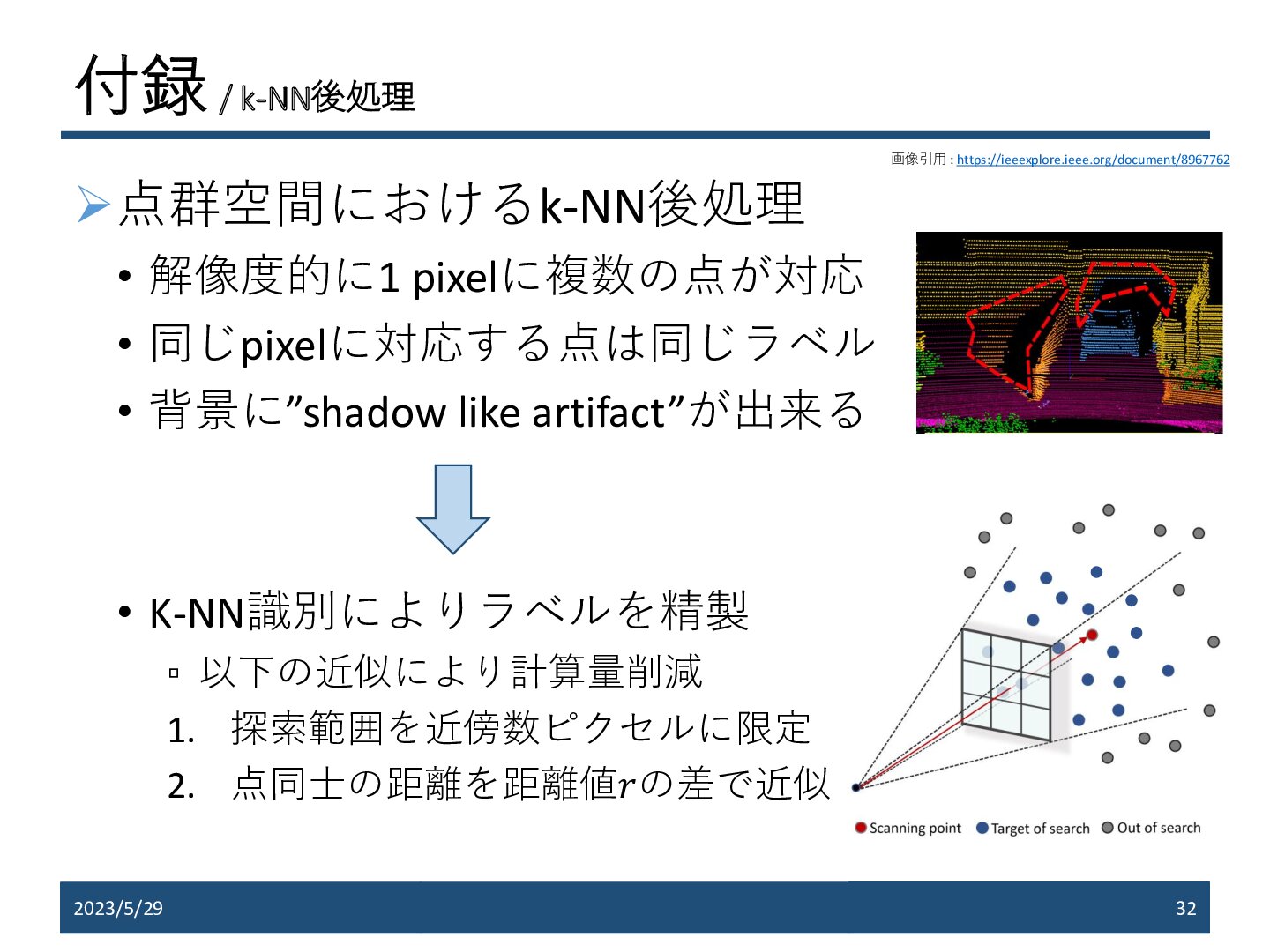
自動運転を実現するには,正確でロバストな環境理解が求められる.そのためのタスクとして, LiDARを用いた点群のセグメンテーションの注目度が高く,様々な手法が提案されている.その中でも, LiDAR点群を球面投射して2次元の距離画像に変換してから畳み込みニューラルネットワークを適用するというアプローチが,その効率の良さと設計のしやすさから主流になっている.
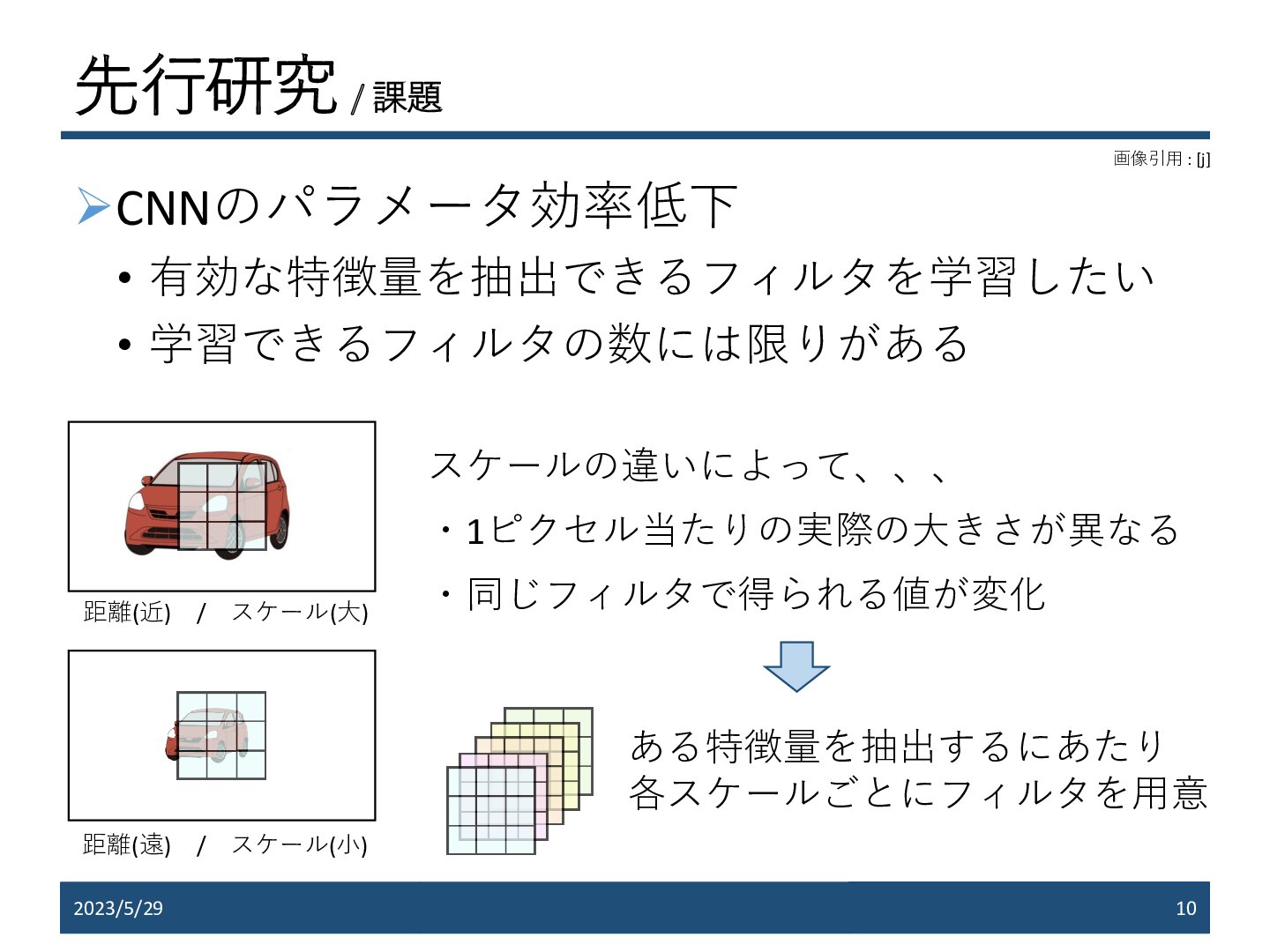
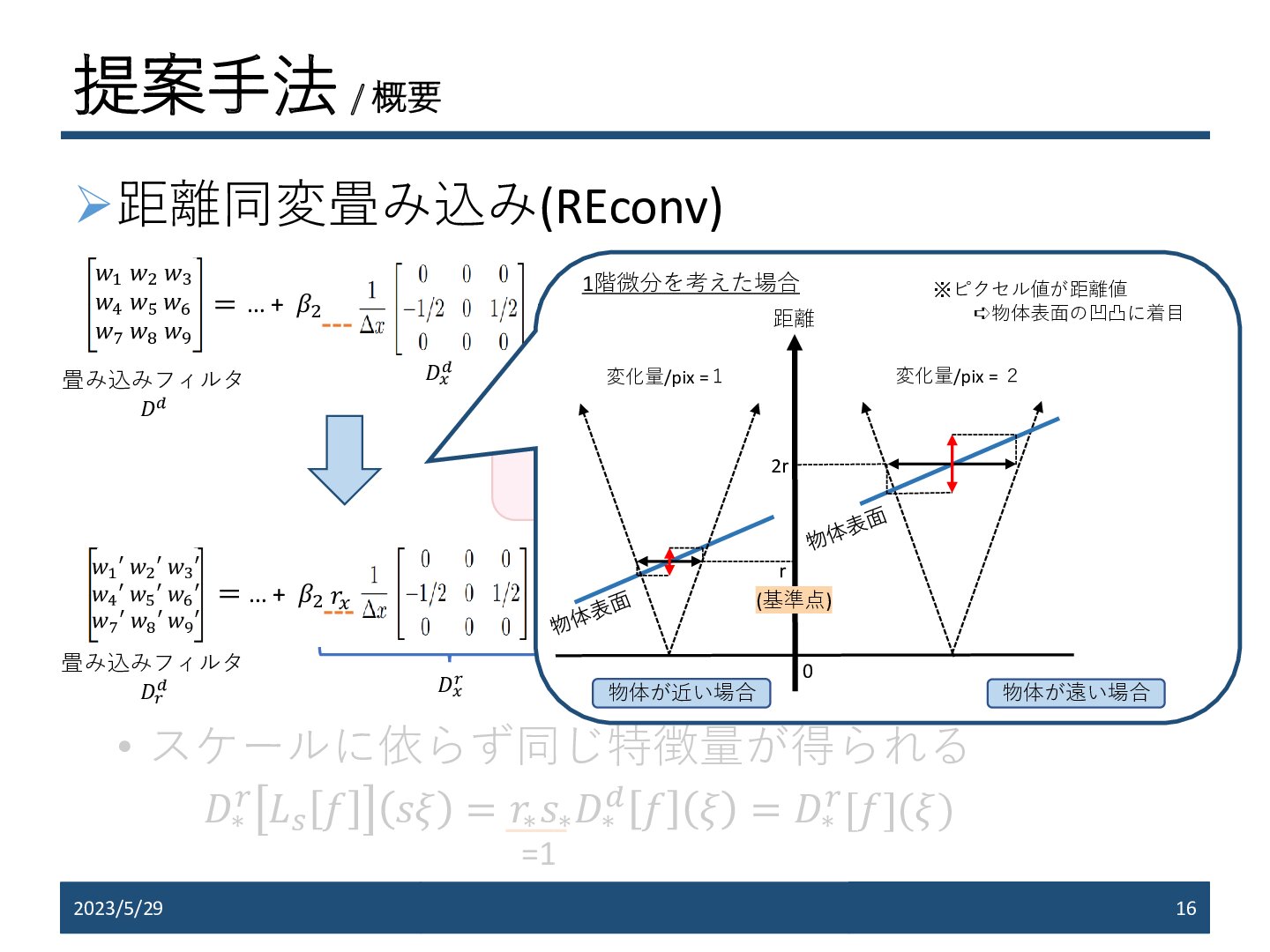
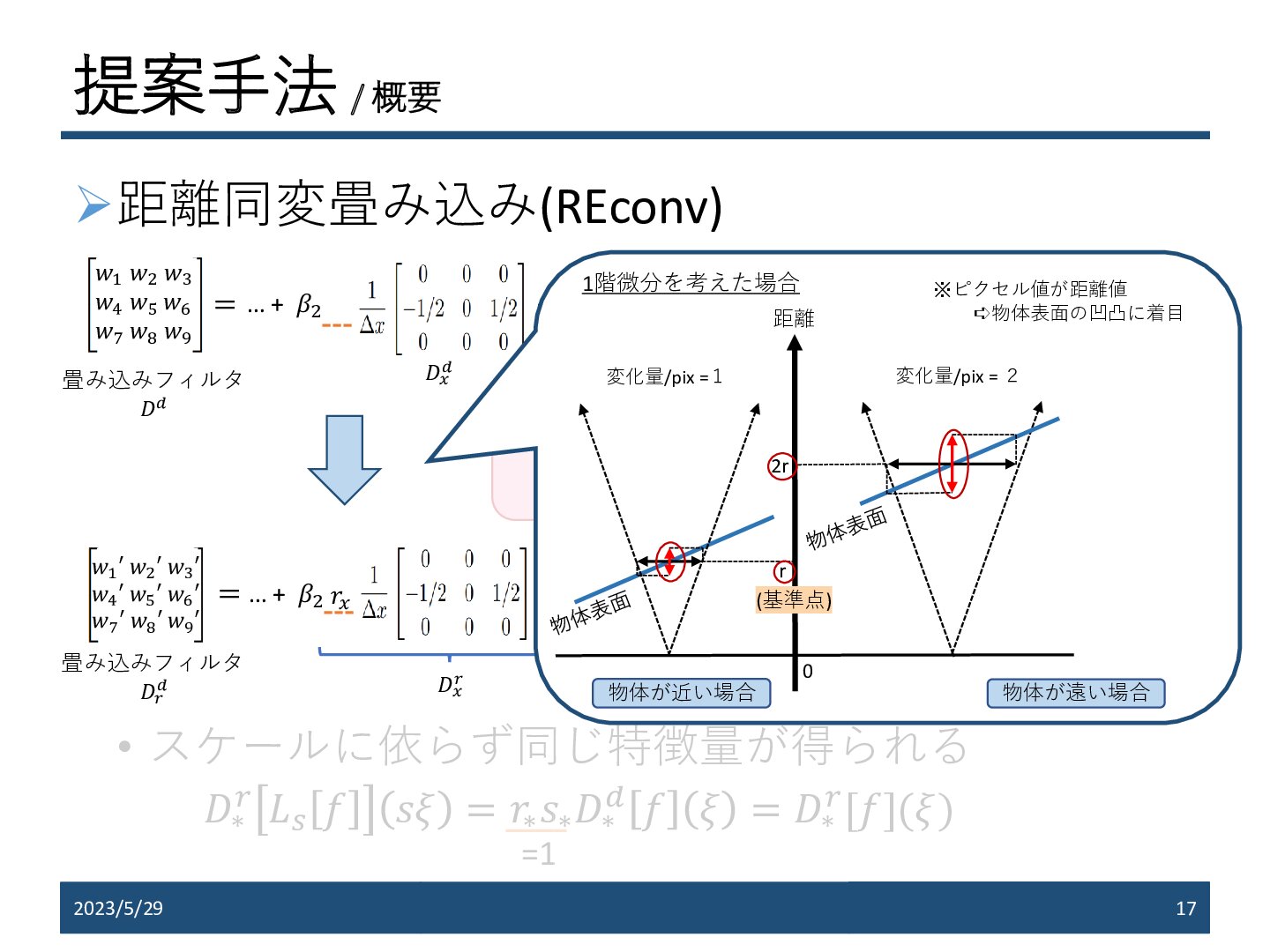
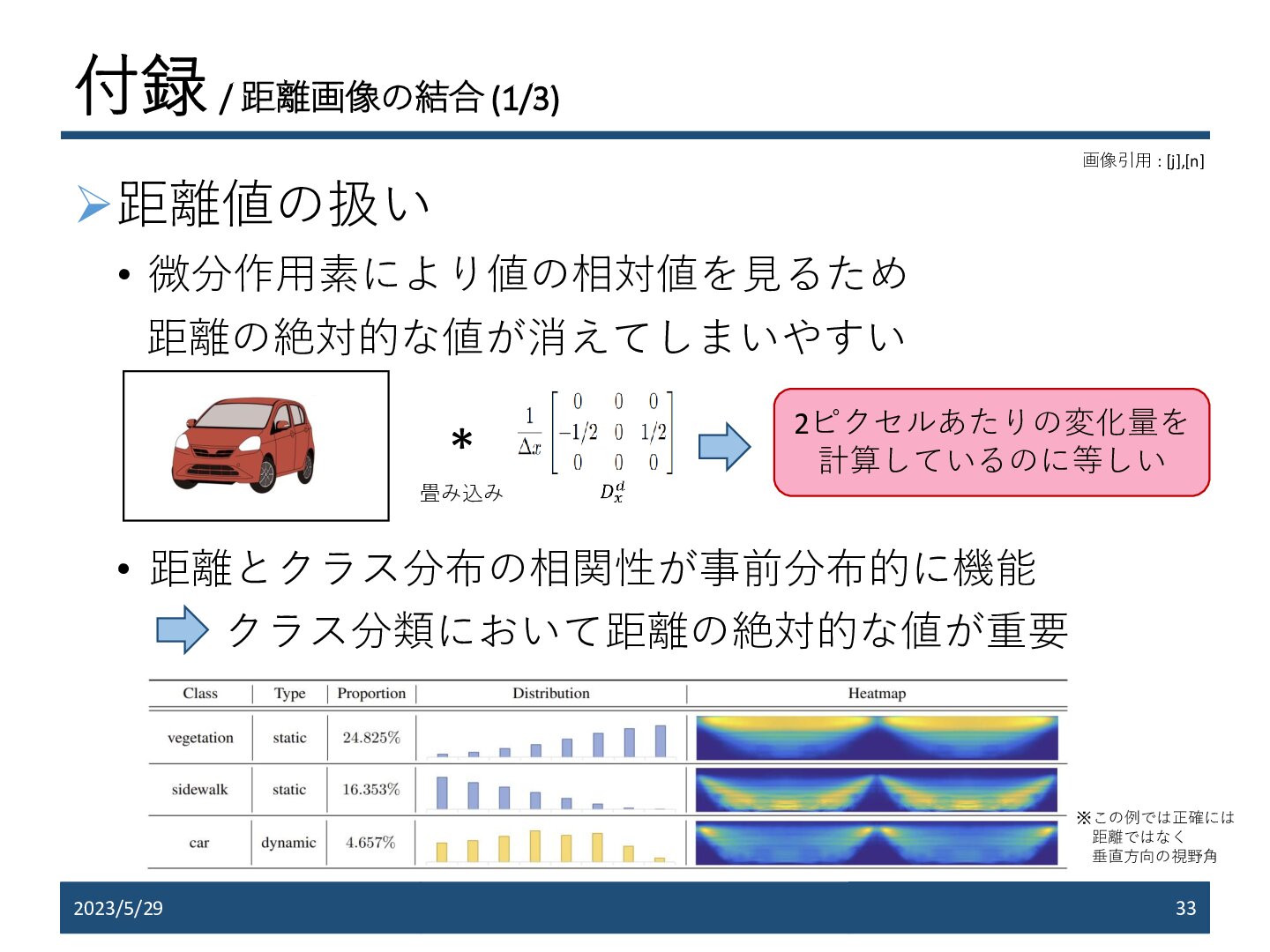
ところで画像の中では,遠くの物体は近くの物体と比べて小さく表現される.そのため畳み込みニューラルネットワークの中で,異なる種類の畳み込みフィルタが反応する.つまりあらゆる大きさに対応した畳み込みフィルタを学習する必要があり,畳み込みニューラルネットワークの効率性・汎化性が低下している可能性がある.
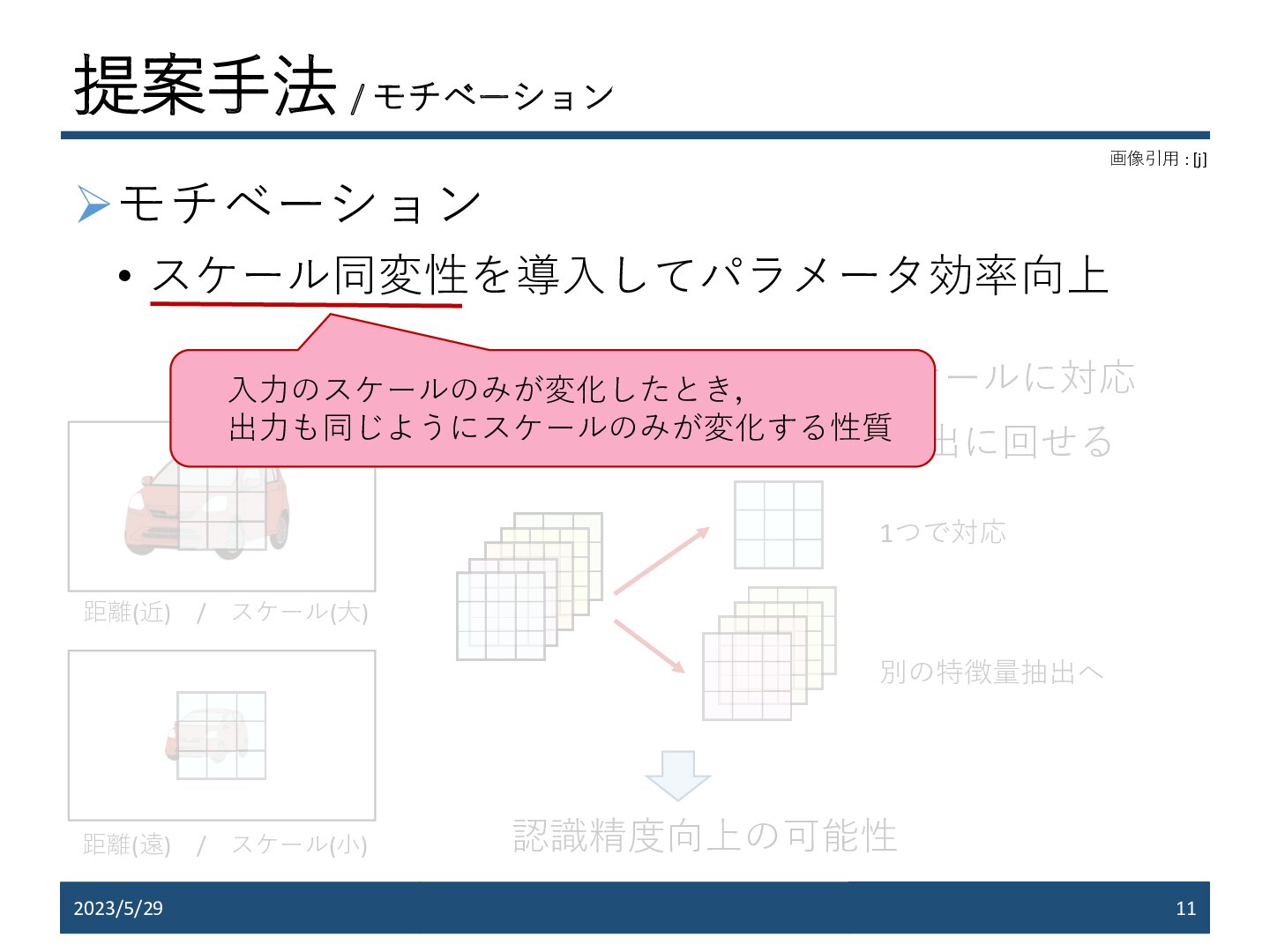
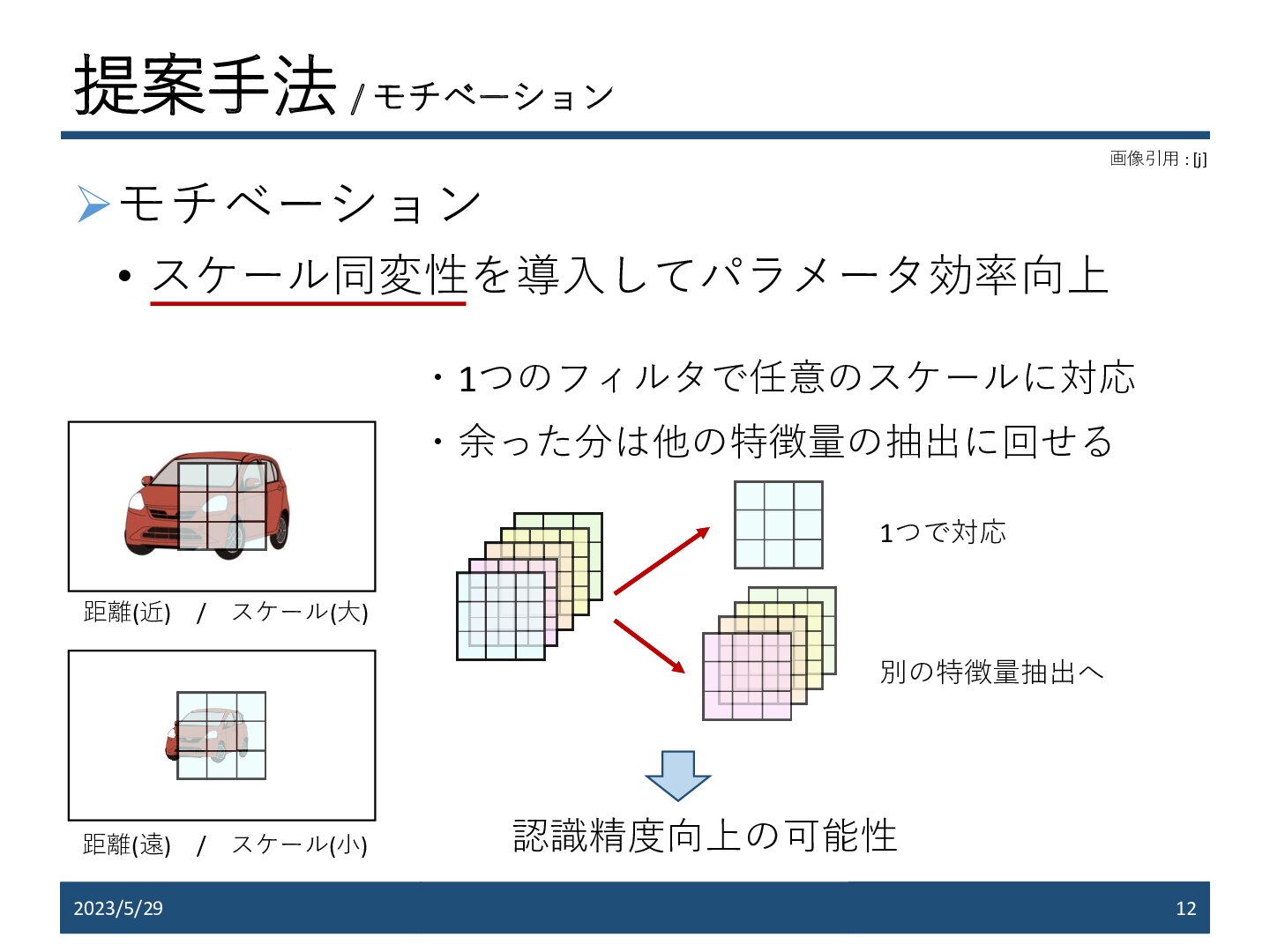
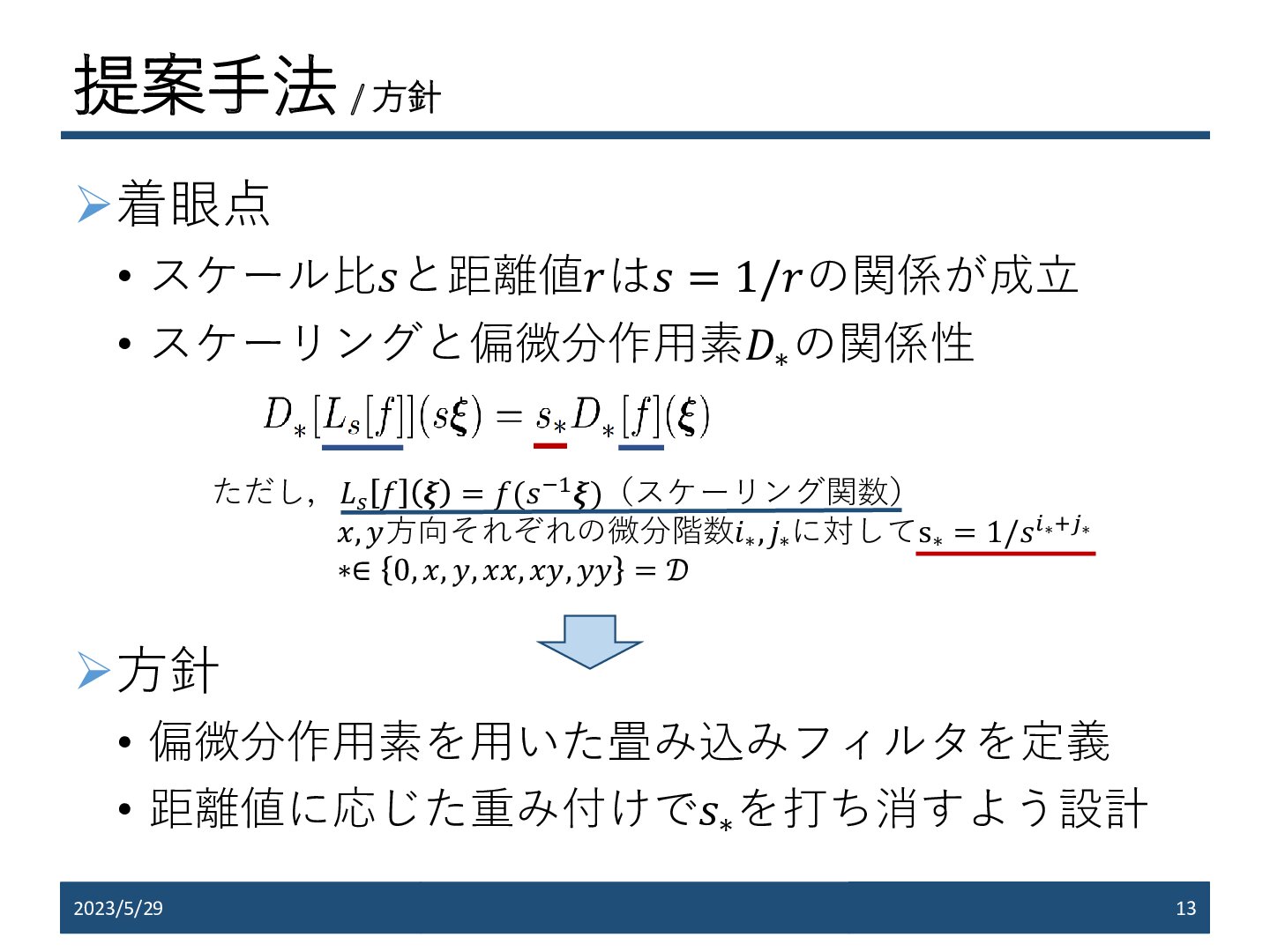
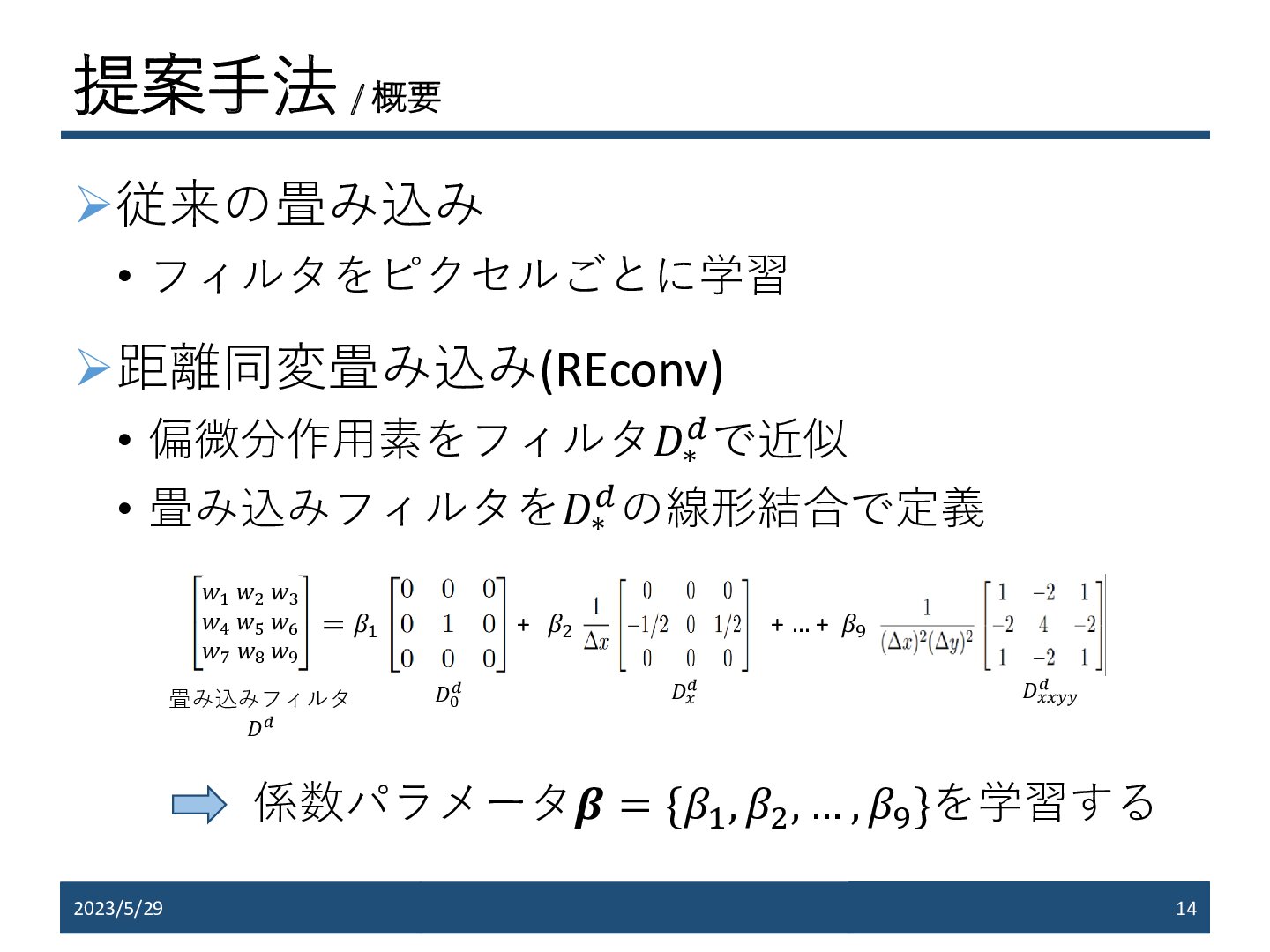
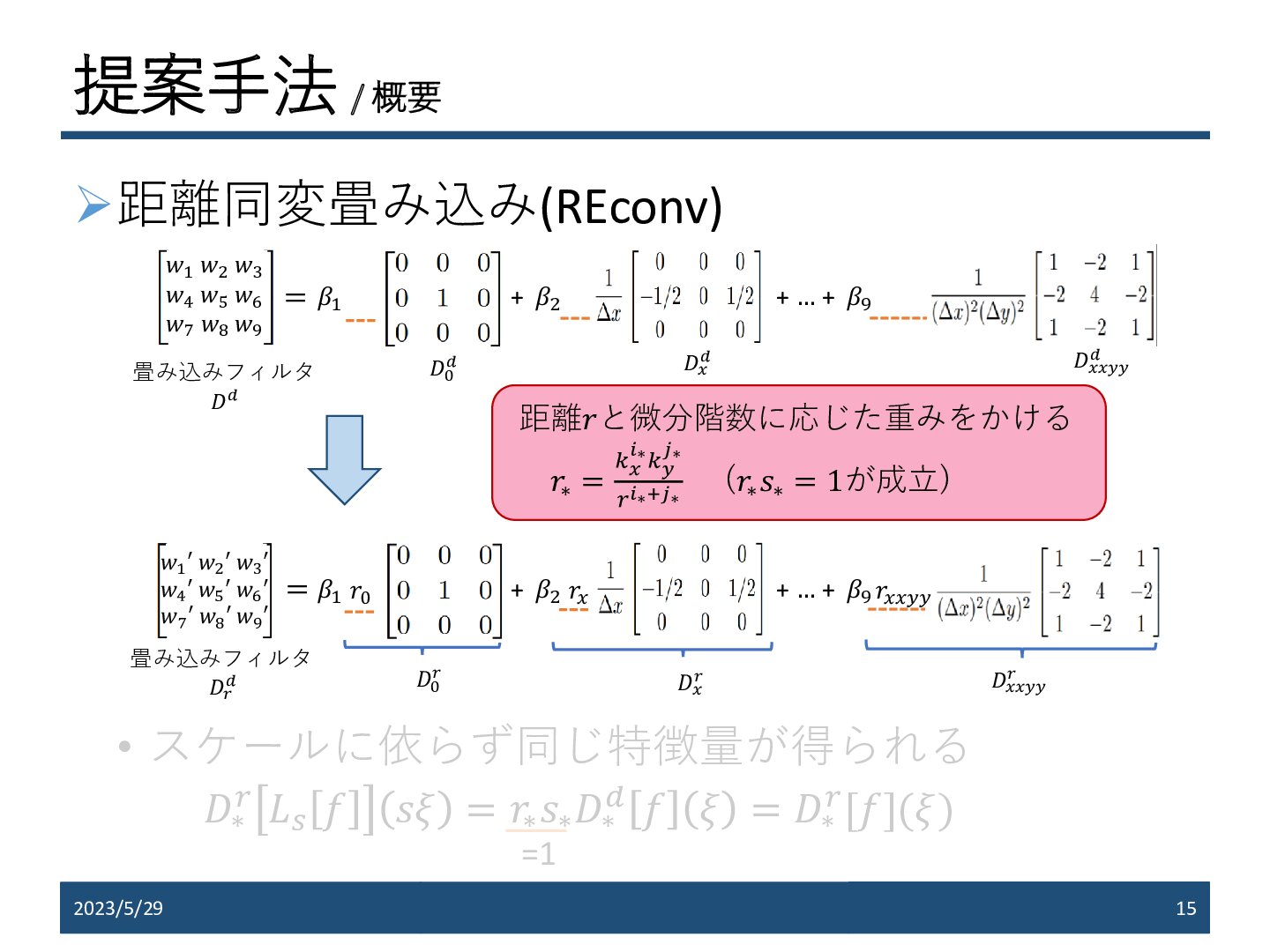
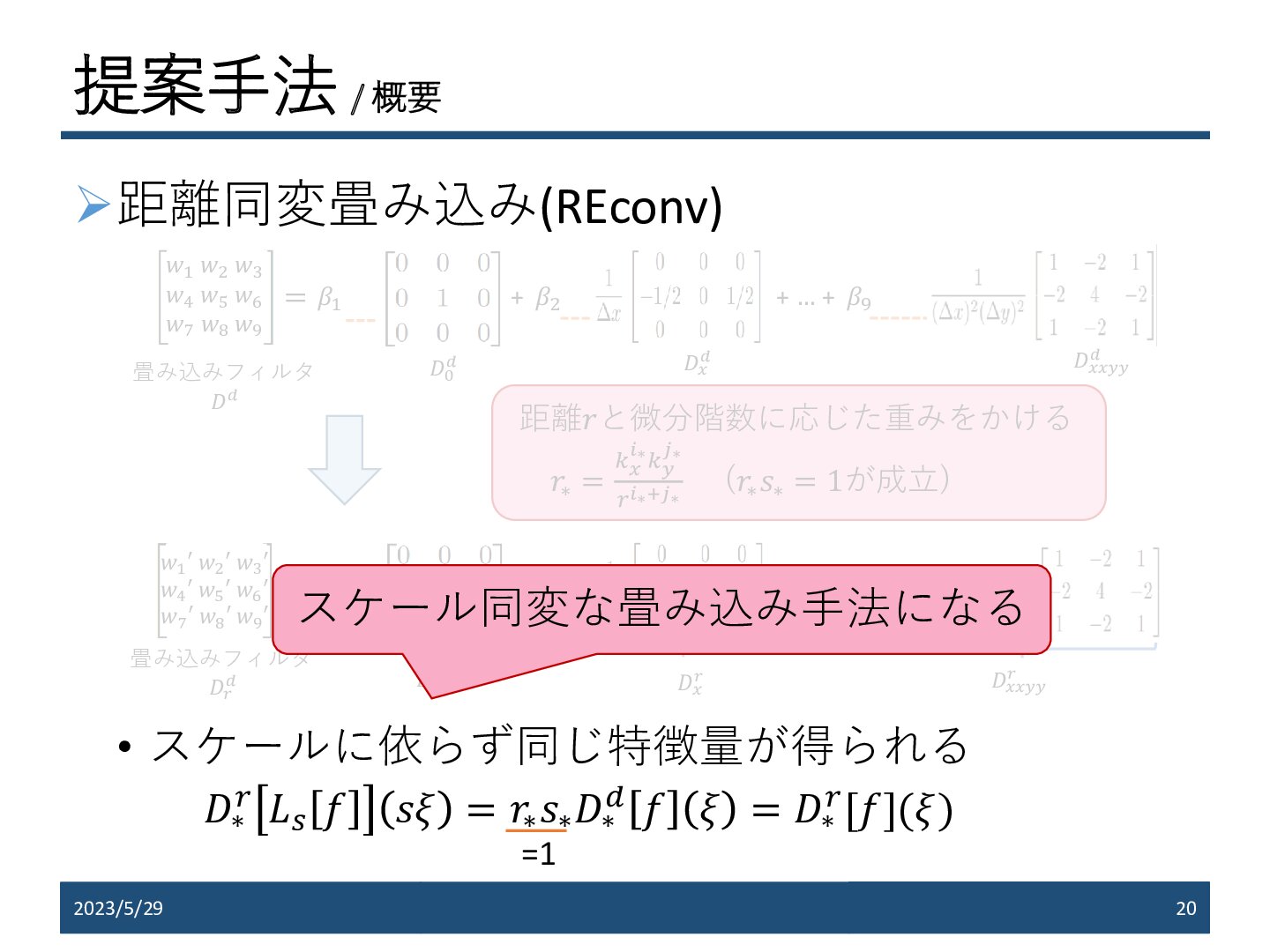
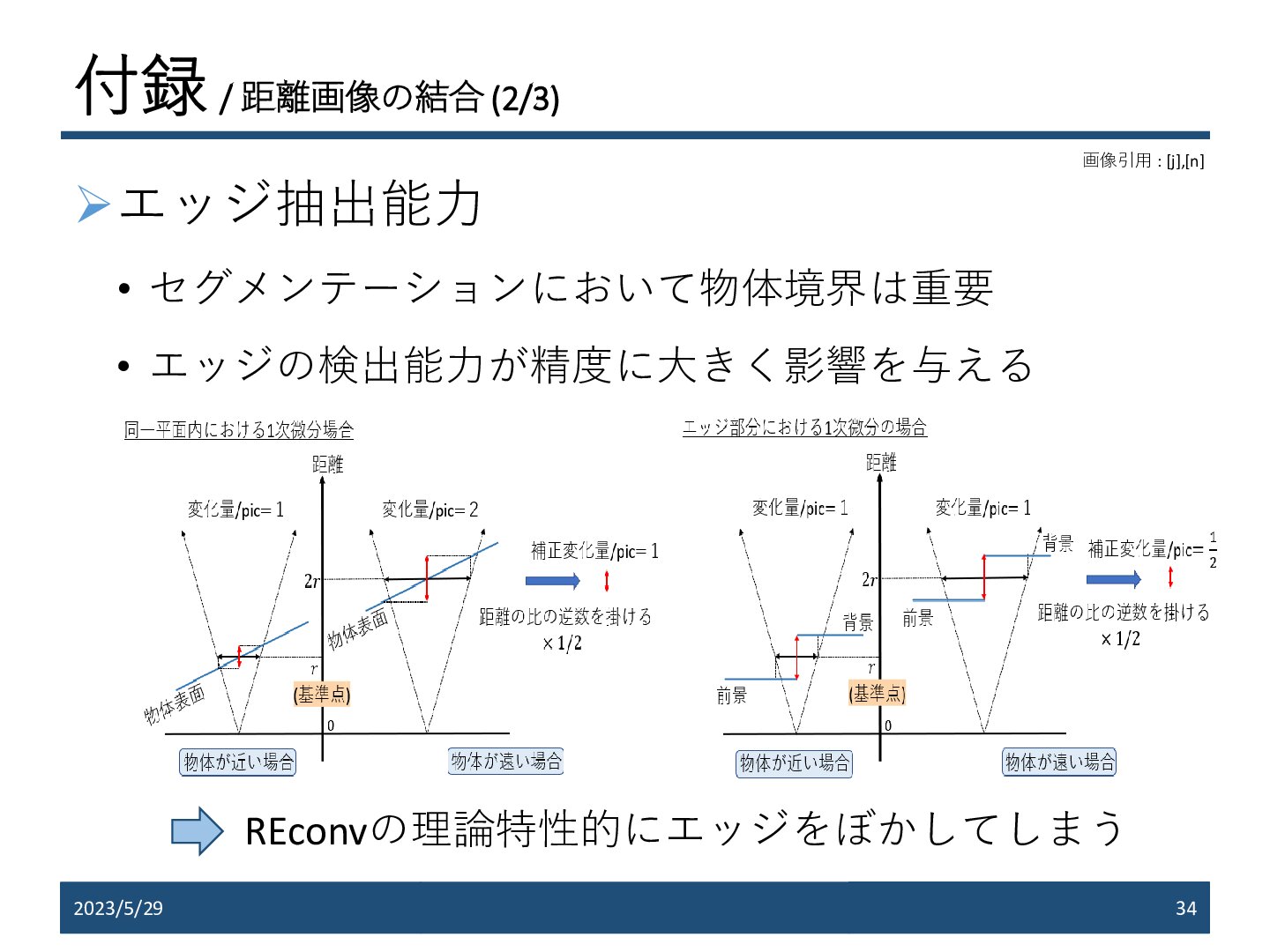
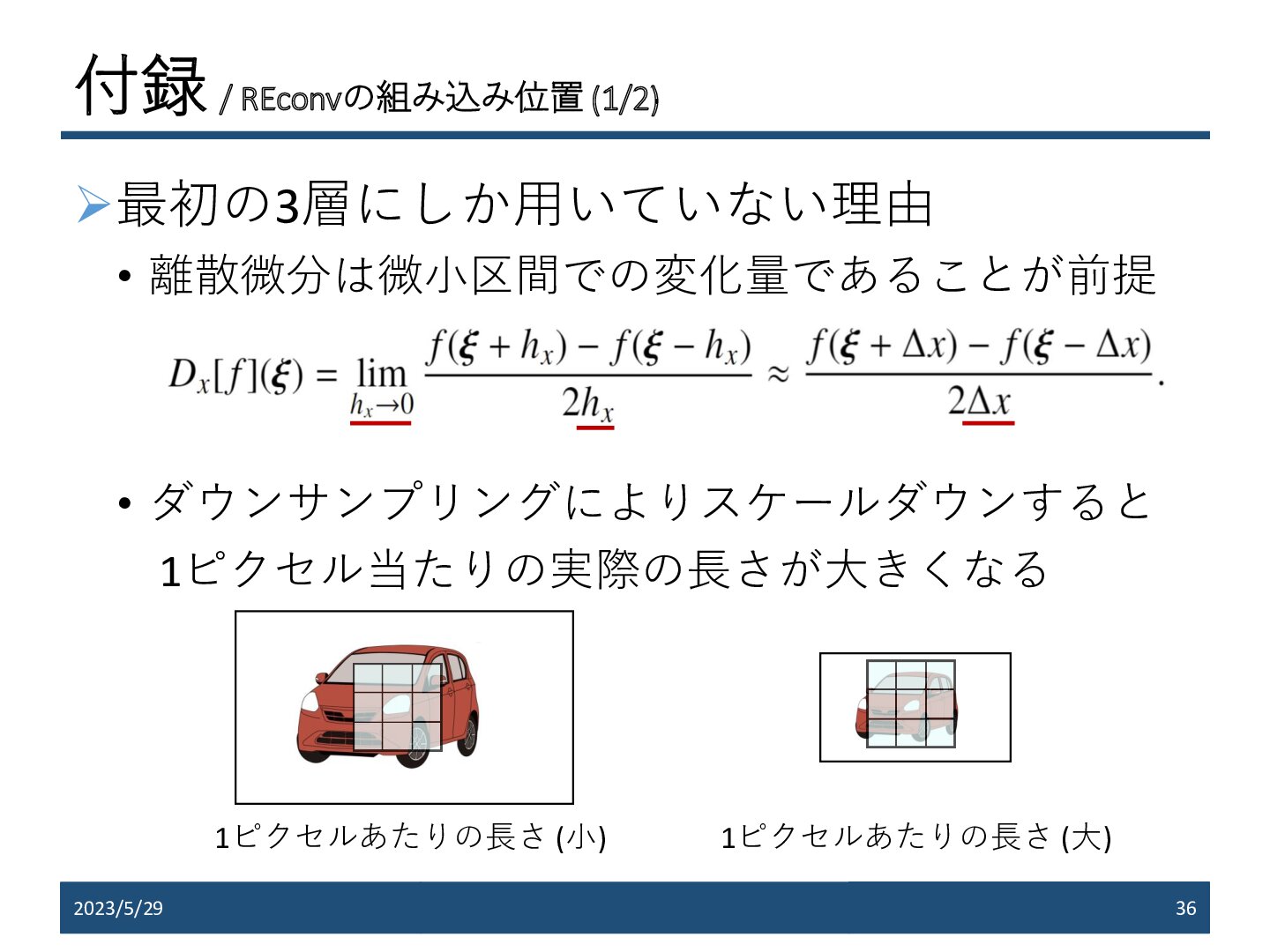
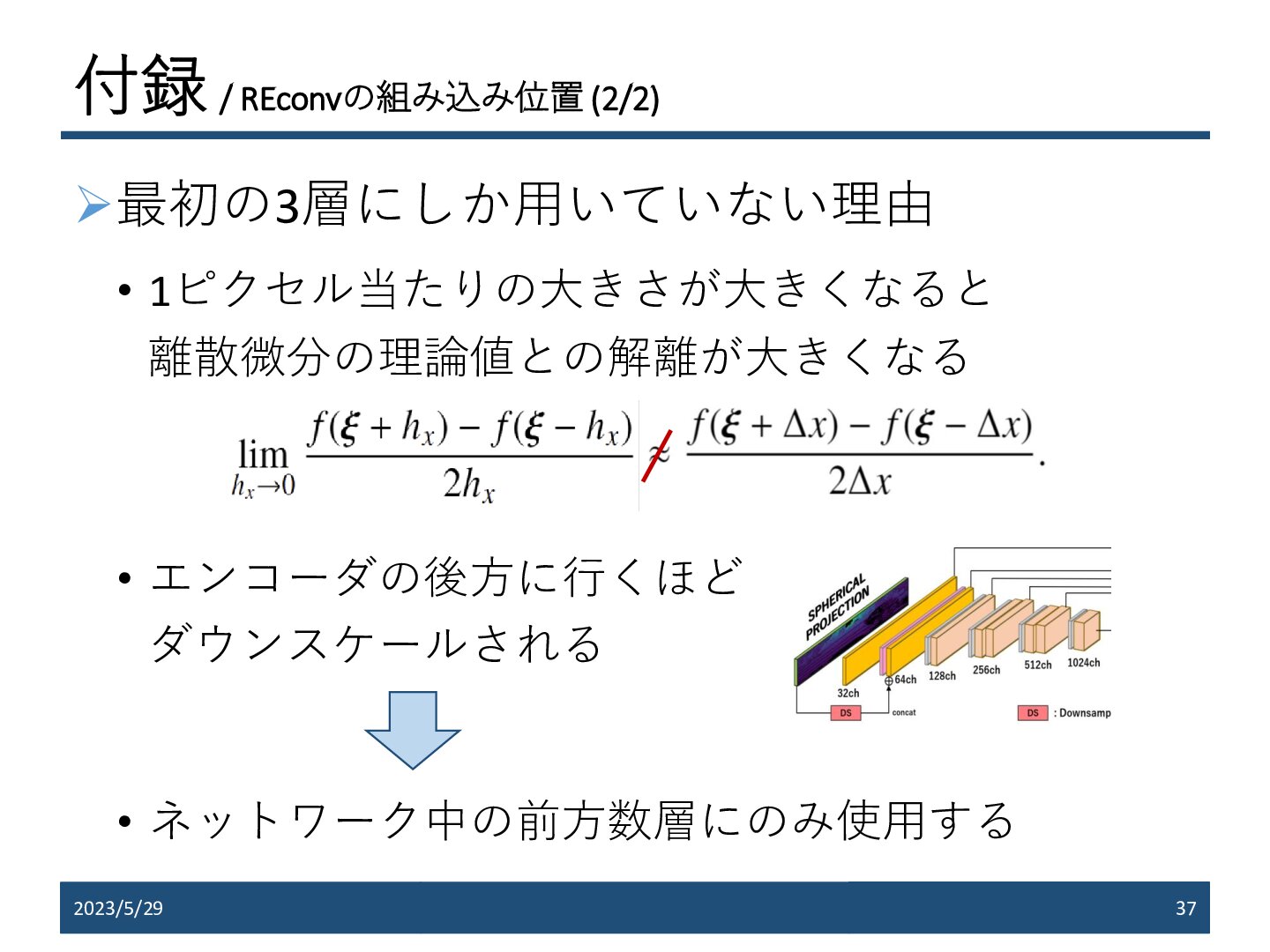
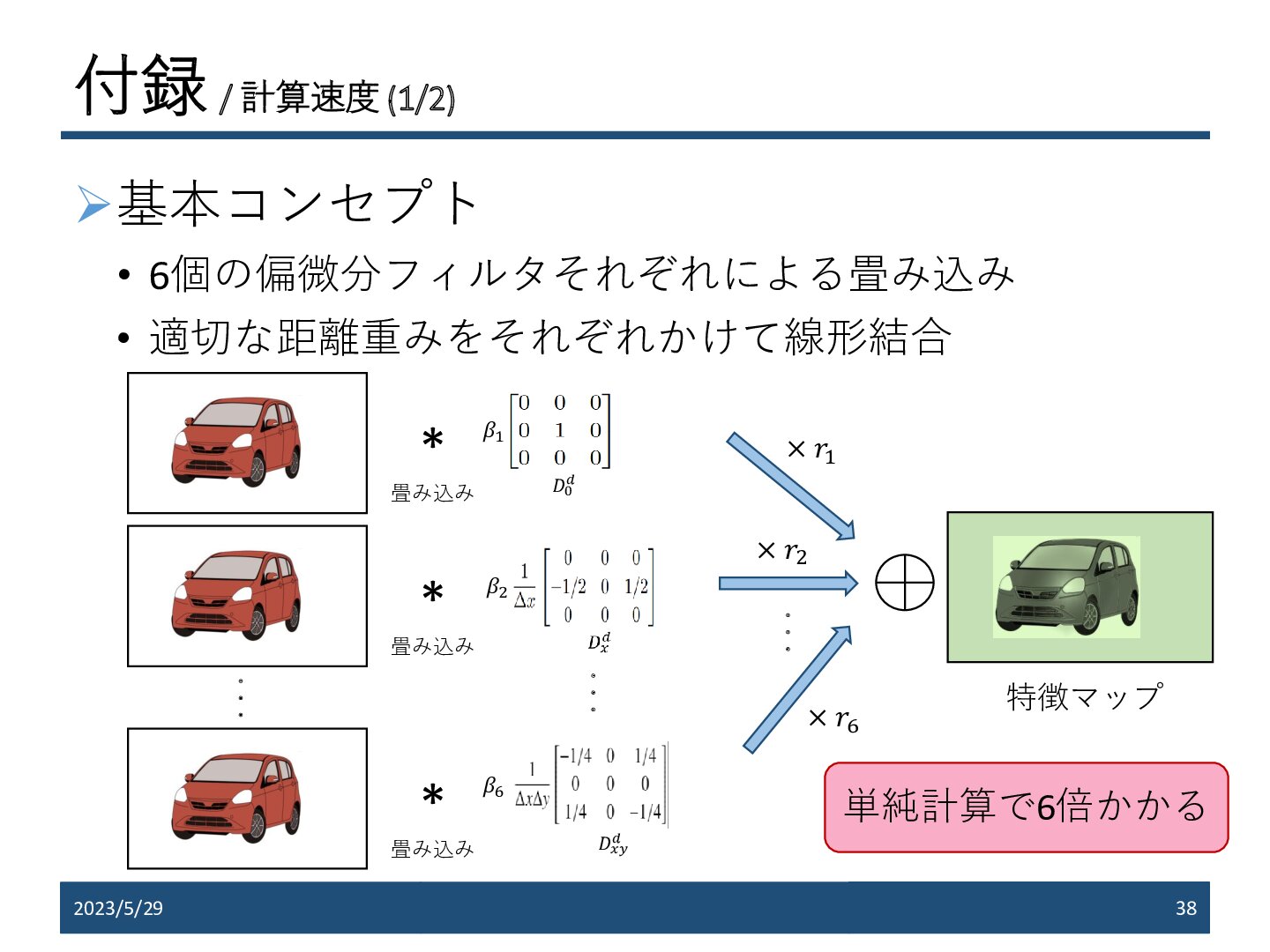
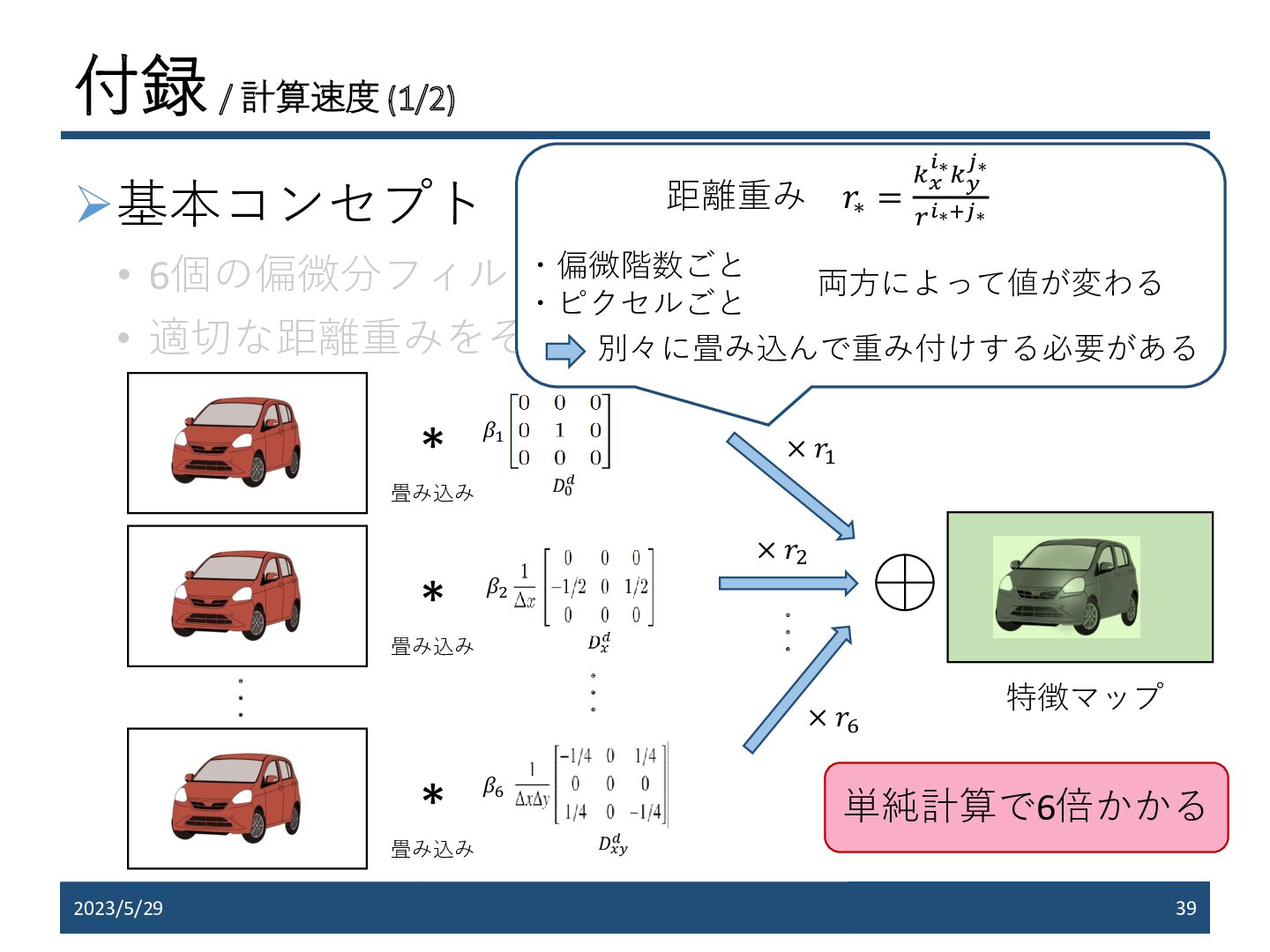
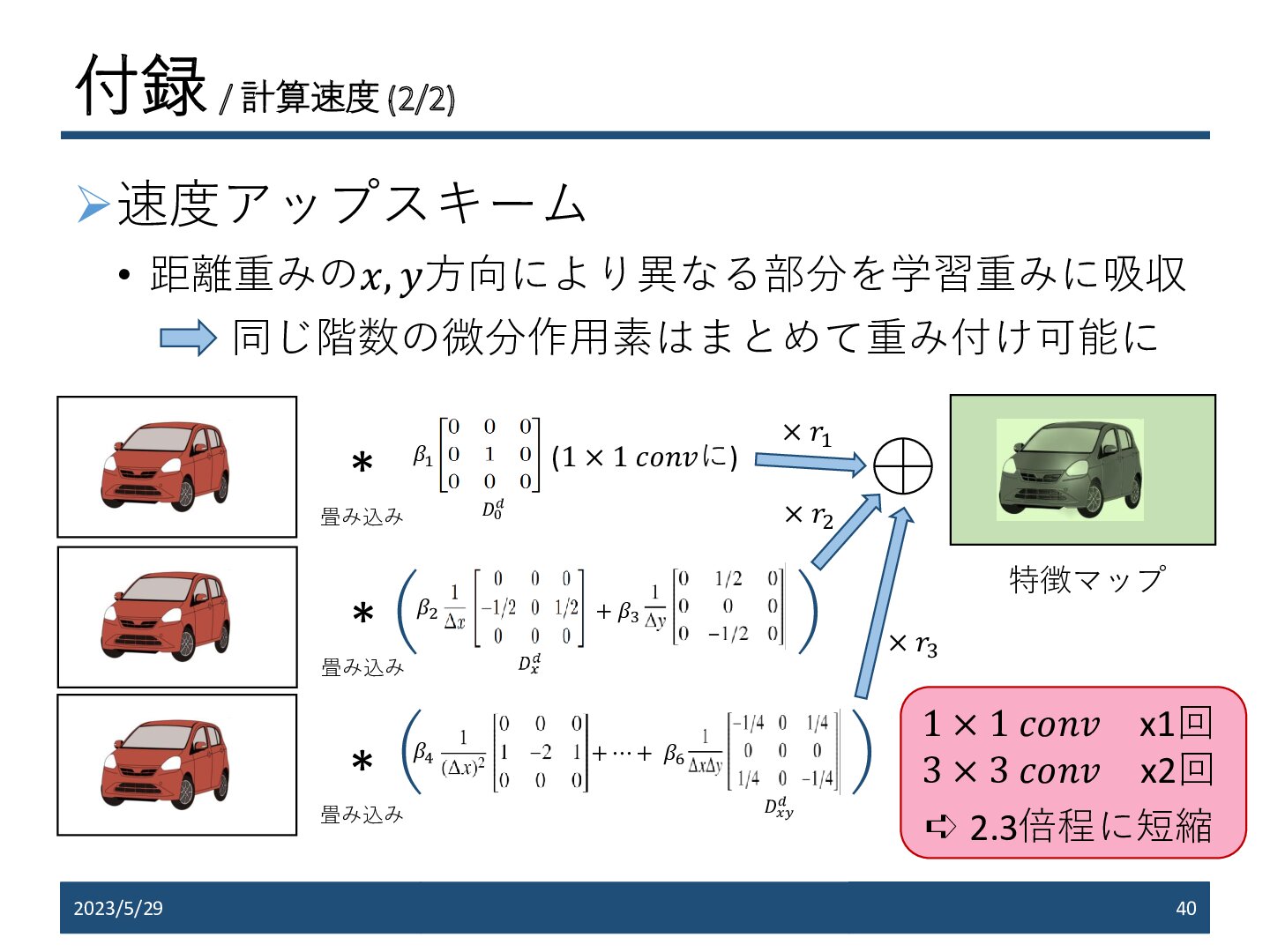
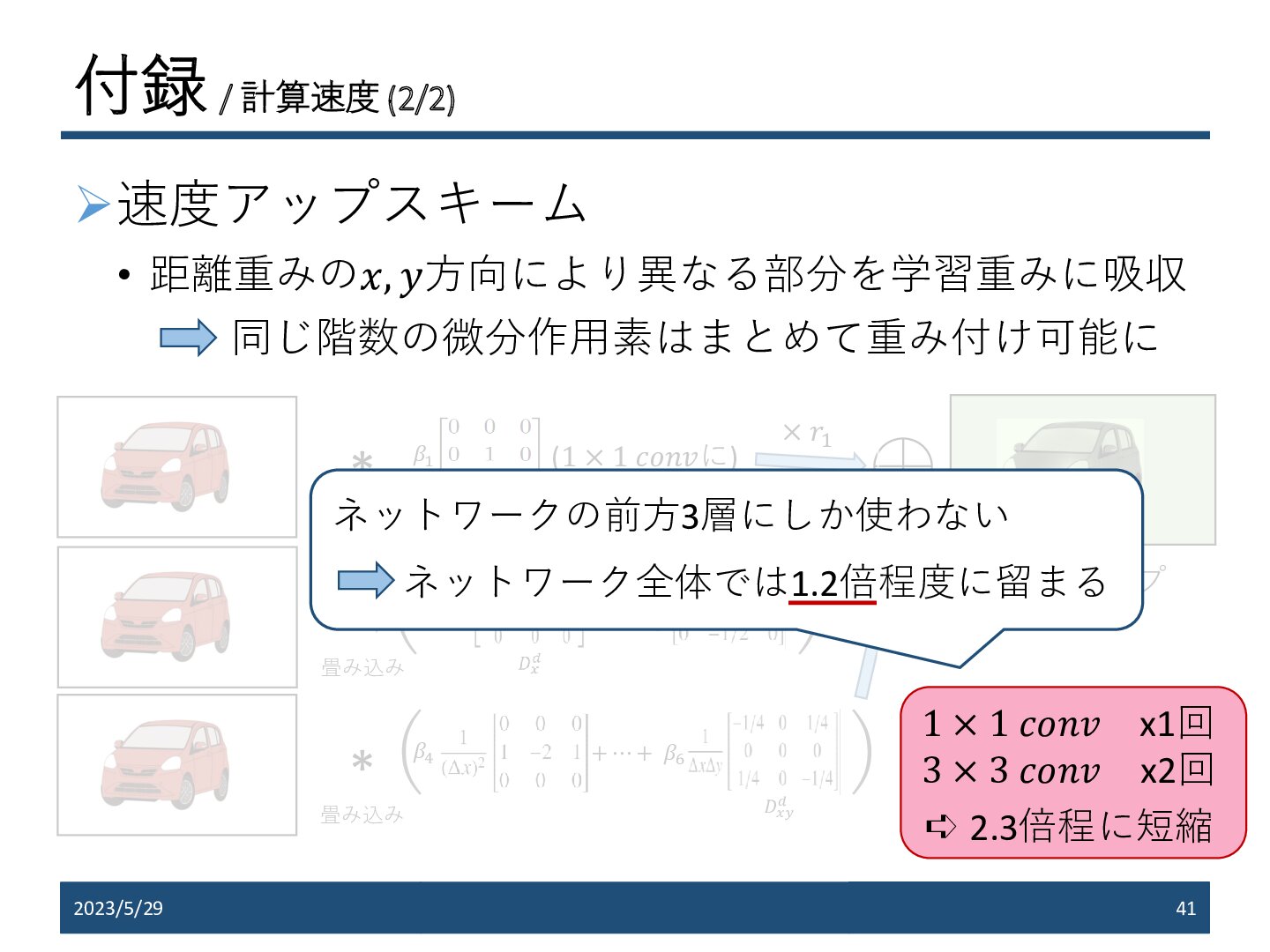
そこで,物体までの距離と画像中のスケール比の間に反比例の関係が成り立つことに着目し,偏微分方程式に現れる差分作用素を応用し,異なる大きさに同じ重みフィルタを用いることで,スケール同変性を向上させる距離同変畳み込みを提案する.
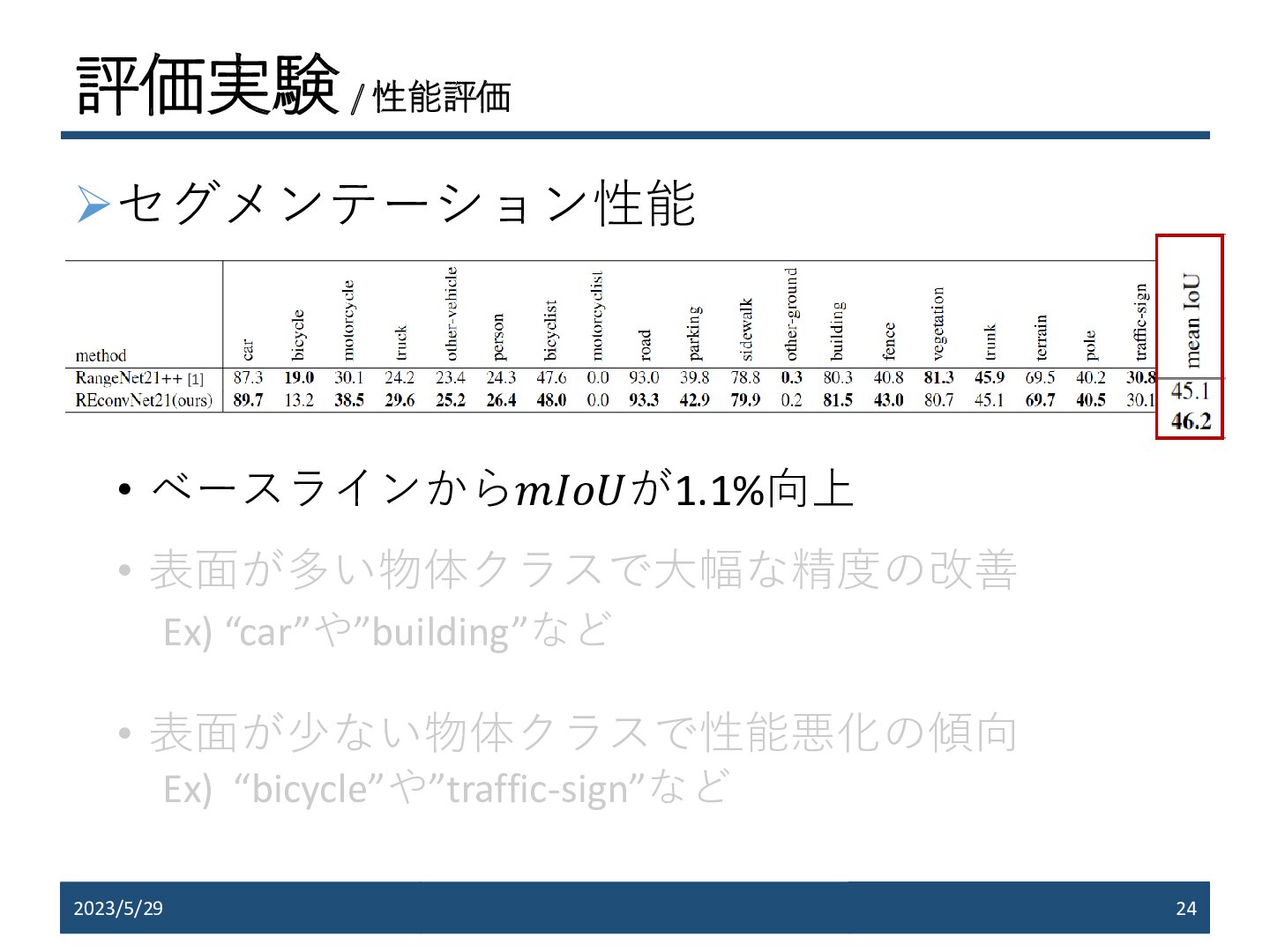
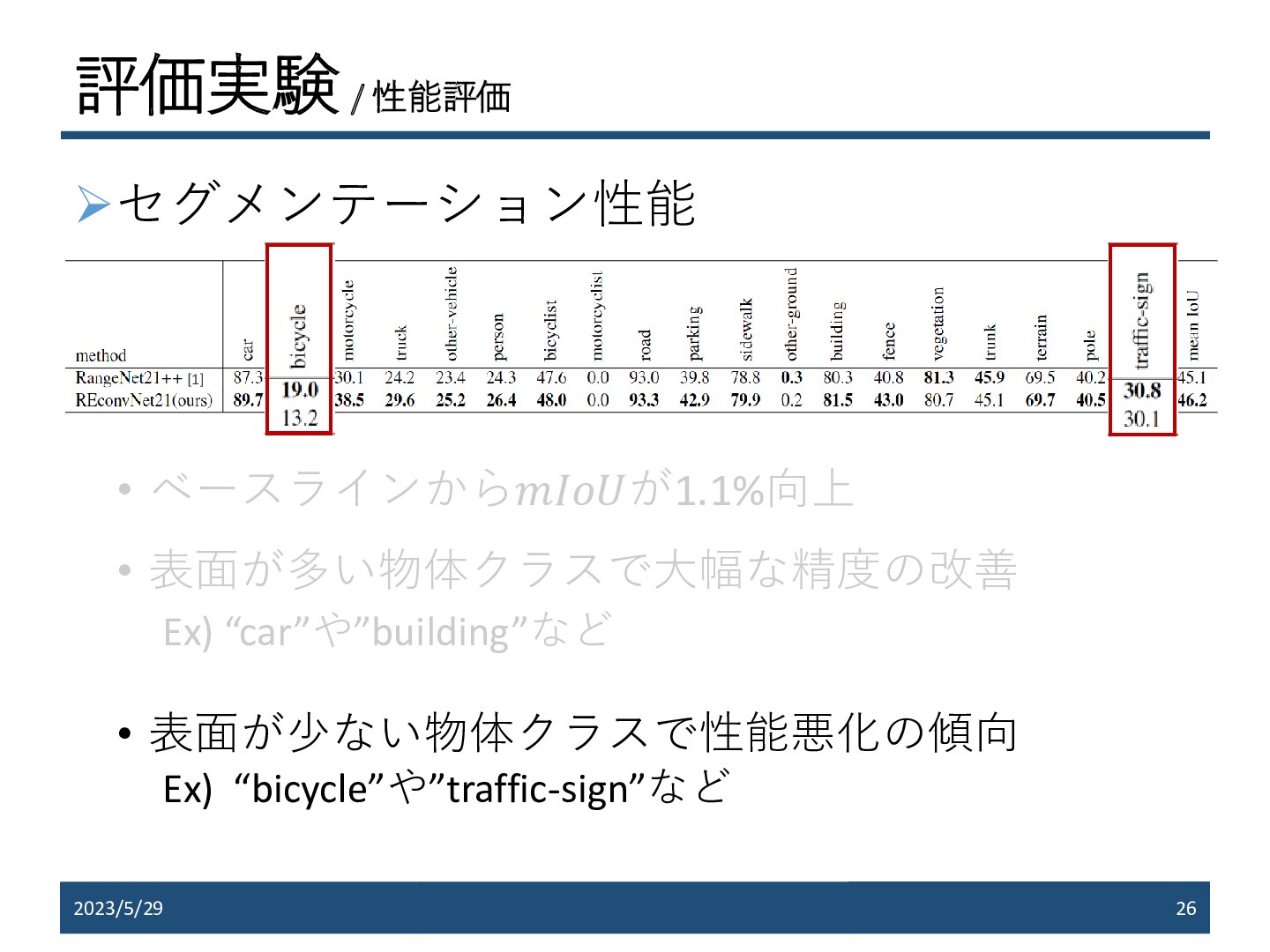
既存のLiDAR点群セグメンテーション用ネットワークに提案手法を組み込むことで,性能の向上や,実際に同変性があることが確認できた.